
Sunday, May 7, 2017
Final Post
Well, That's a Wrap! I have attached my final presentation to this post. Thank you so much for all of the support and a special thanks to those of you who attended the presentations yesterday!
Saturday, April 15, 2017
Week 10
Well, here we are, Week 10! The ultimate week to my srp!
This was the last week I spent on site, and this week was really laid back, I just had to graph out a bunch of 3-D mesh plots and then I was able to finish my final presentation.
As I worked through my presentation, I reminisced about everything that I had learned. It was a really great experience. I learned so much, about the technical side of prosthetic development, and the movement of the prosthetic. I actually got to use a prosthetic, and learned the frustrating reality of its capabilities

 Also as a bit of clarification, I am going to take some time to properly explain the main error I encountered during this project. So, when grabbing an object in this experiment, and with things in real life, your fingers curl in. When doing so with the motion sensors, the motion cameras around me, as seen in the picture to the right, didn't pick up data.
Also as a bit of clarification, I am going to take some time to properly explain the main error I encountered during this project. So, when grabbing an object in this experiment, and with things in real life, your fingers curl in. When doing so with the motion sensors, the motion cameras around me, as seen in the picture to the right, didn't pick up data.
So then along with that, my final presentation came as the final culmination of this entire project. Although I did procrastinate and watch a couple of videos on Youtube, I was able to mostly stay on track and finish up my presentation. It was interesting when compiling the social attitudes, because I went in depth on different societies, but as an overarching analysis, I saw how with the Industrial Revolution, and more manual jobs, the increasing near for prosthetic functionality increased. Earlier with societies, such as Egypt or Greece, and even in the middle ages, prosthetics centered around cosmetic appearance. That was just something neat that I noticed.
As for my final product, I still am trying to decide what to do, so if you have any suggestions, please include them in the comments section.
Yeah, and that's a wrap! Thank you all for reading!
Friday, April 7, 2017
Week 9


Almost there, second to last week!
So this week, I had a total of 30 excel files full of 1800 or so data points, I spent almost all of this week. Thinking about it, the motion sensors picked up data every 20 milliseconds in each 6 second trial, and some of the data was incomplete because the cameras could not pick up the motion sensor.
So this week, I had a total of 30 excel files full of 1800 or so data points, I spent almost all of this week. Thinking about it, the motion sensors picked up data every 20 milliseconds in each 6 second trial, and some of the data was incomplete because the cameras could not pick up the motion sensor.
So I had to export the data from each of the excel files and interpolate it with a MATLAB function. I had to fill in the blanks for the data, so that I can plot the data and look at the velocities. WIth the velocities, I can analyze the movement of each of the sensors, to look at the overall motor movement of my hand and the prosthetic.
 I have to finish my presentation for the 13th, so most of my week was also spent compiling the info that I had gotten from the papers I read. It was really interesting to put all of that information in front of me and see some of the problems that I had noted. Possibly the most important knowledge I gathered was that the willingness to accept and adapt is the most important aspect for a prosthetic user. They need to accept that their life is different and they need to adapt and learn how to live their lives as close to how it was before. They need to also accept that having a prosthetic makes them nothing less than everyone else. And to make this transition easier, is what I hope to help with my research.
I have to finish my presentation for the 13th, so most of my week was also spent compiling the info that I had gotten from the papers I read. It was really interesting to put all of that information in front of me and see some of the problems that I had noted. Possibly the most important knowledge I gathered was that the willingness to accept and adapt is the most important aspect for a prosthetic user. They need to accept that their life is different and they need to adapt and learn how to live their lives as close to how it was before. They need to also accept that having a prosthetic makes them nothing less than everyone else. And to make this transition easier, is what I hope to help with my research.
So that was my second to last week, it was fun, just compiling the info and data, which I will be analyzing soon. As usual, if you have any questions, feel free to ask them in the comments below. Thank you!
Saturday, April 1, 2017
Week 8

Week 8, home stretch here I come!
So, this week was off to an excellent start, I started by reinstalling MATLAB after my computer stopped working, and then realized that I needed to get some work done on the paper end, by looking through some papers of social stigmas. This week literally sped by fast and was a whirlwind of information that I am still recovering from.
But the thing is that all of these time-consuming tasks are really hard. I may just give up. On second thought, this is probably my last post for this project since I am quitting. See Ya!
....
APRIL FOOL'S!
Yeah, no I am not quitting, just felt like including that in for the sake of mentioning that it is already April!
So back to what I was saying, with the data, I am going to be running it through MATLAB with a function to interpolate it. Essentially, what I will be doing is use a function to plot the data, and fill in any gaps with logical data given the other data. After I interpolate the data, I will begin with the next part of the analysis! If you guys need a better explanation, just ask away in the comments below. See you all next week!
**EDIT-It won't allow me to post gifs, sorry about that**
Friday, March 24, 2017
Week 7

So, last week was quite eye-opening and indicated a shift. Change is good, and in this case, it worked out well, I was able to use the prosthetic and I obtained data!
I realized that I may not have explained it that well, so as a quick summary of the new methodology for what I did, I began with my hand and the prosthetic device. I started out with three objects, a box, a cylinder, a baseball, and a roll of tape, all seen below.
I realized that I may not have explained it that well, so as a quick summary of the new methodology for what I did, I began with my hand and the prosthetic device. I started out with three objects, a box, a cylinder, a baseball, and a roll of tape, all seen below.
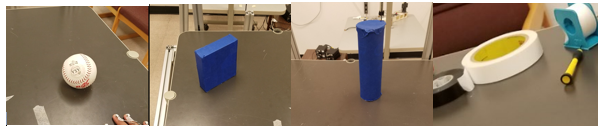 |
| Most everyday objects that one would encounter, along with a baseball for spring training |

Then Dr. Fu and I attached motion trackers to my hand, one on each finger and one on my palm. Then with a motion tracking software, I used my hand grasped the objects, lifting them up briefly, before placing them back down. This was to see and obtain data as to how I naturally approached the object with my hand. As a test, I used the hand, and just moved it around with motion sensors to make sure the sensors around me could pick up all of the trackers.
I then had a prosthetic hand attached to me. The Softhand pro device is actually quite heavy, and the one I used also had a silicone, soft rubber cover on it. I used it in this elaborate setup where it was attached to a rig made of pvc pipe and a stand, with the same module that it would use to attach to an amputee. It was then secured to me with some velcro. In the picture below, the hand has the motion trackers taped on, and it is attached to my hand. You can not see it, but there are two surface EMG sensors that are attached to my forearm. The white thing that I am holding onto is not a joystick, it is just something to hold onto, and when I move my wrist, I can manipulate the prosthetic.

Then I used the prosthetic and lifted the objects, and obtained the motion data for the different objects, doing three trials for each object, for both my hand and the prosthetic.
This was also a valuable experience because I learned how hard it is to use the prosthetic. Sometimes the prosthetic does not register your EMG's so it is just a deadweight dragging down your arm. For me, the biggest problem was picking up things, like I played around with it, making my own small game of jenga with objects around the lab, and it was really hard to use. I think picking up the roll of tape was the most frustrating thing every, because, every time I grabbed for it, it slipped through the palm of the hand.
Well, so that was the experimentation in my project. I used the prosthetic, and I got some real experience with the short comings of the prosthetic device. I mean, I only spent a couple hours with it, and to imagine Amputees look to their prosthetics with hope, and they use it for the rest of their lives, that is a great feat of strength. Thank you for reading. I have a lot more footage of my trials, but most of that is under wraps because it will go into my final project presentation. Don't forget to leave any comments below and share your thoughts on this week. See you all next week!

Friday, March 17, 2017
Week 6

I am back this week with some ground breaking news! So my project has culminated itself in a very different way now. What I was going to do was get EMG Data from my hand, and analyze the forces in play with simulations. Well there is good news and bad news...
 So for my project, I was planing on using EMG's and getting Force data from the simulations, but the social aspect and the analysis of social attitudes seen in various papers are interesting me. With the simulations, it would have taken far too much time, and that would mean I could not get enought data. So that is not going to work out. That was the bad news.
So for my project, I was planing on using EMG's and getting Force data from the simulations, but the social aspect and the analysis of social attitudes seen in various papers are interesting me. With the simulations, it would have taken far too much time, and that would mean I could not get enought data. So that is not going to work out. That was the bad news.
Now for the good news! So my new methodology is more straight forward than what I was planning to do. For the new experiment, I will be analyzing the same motor function of grasping, but the slight difference comes in the way it will be observed. I will be using the prosthetic and controlling it with my EMG's. The same EMG's I would put into moving my hand, I would use to move the prosthetic, and that would be done using an EMG sensor and a separate program to translate the EMG's to the prosthetic. I hope that makes sense so far.

Now with three different objects, I would use my EMG's to run the prosthetic and my hand, and grasp the object. With a primary recording of my muscle movement, with a myograph of when I clench my fist, and grasp the objects, I would see if the hand can replicate the movement using the same EMG's.
So this week was essentially my first main trial and error, and it showed me that what I was doing was on a scale unlike the nature of this project. I wanted to do a lot in an amount of time, that I cannot really do. Other than those important developments, I will continue to look through papers, and I will be doing a mid-week update for week 7 about the paper I am currently reading through.
I hope all of that makes sense. I will answer any questions in detail in the comments below and in my mid-week update. Thank you!
Friday, March 10, 2017
Week 5

After a relaxing spring break, I am back to my project! Week 5 just wrapped up, and things are going well.
 |
| The unusually dark hallway to my lab |
ASU has it's spring break this week, and going to my site felt kind of like walking through a ghost town. Most of my week was spent going through some papers and getting my program to work. I covered a remarkable amount of ground with my social analysis. I read through a couple different papers in the American Journal of Nursing, that talked about different reactions to prosthetics. Something important that was mentioned in one of the papers,“The Pneumatic Arm Prosthesis" was about how there are three primary problems for an amputee: 1) the difference in daily function, 2) the perception of the way society will now view the amputee, and 3) the patient’s reception of the prosthetic (1993). While considering that this paper was published in 1993, the first problem has mostly been taken care of with newer forms of physical therapy, but the second and third are two of the most important social concerns that I want to further explore.
Kind of related to this was a heartwarming story that I saw on the news. It was a story about how a 4 year old boy with an amputation had been given a doll that had a prosthetic. After he lost his leg from an injury while playing with his dog, the four year-old had been using a temporary prosthetic, and a walker, to get around; but Prosthetists were able to design him a prosthetic to use permanently(CBS). In order to get him used to wearing it and removing it, he was given a doll with a prosthetic, that he could use to learn how to use his own prosthetics. After looking into this, I realized that the manufacturers of such dolls and toys made these to get rid of any resistance that children may have as they adapt to their new lives with their prosthetics. It was something small, but I thought it was a touching way to make sure the kid felt comfortable and was happy as he transitioned to using his new prosthetic.
 |
| My Desk |
Other than that, my program is going well, I got the connection built between the Armband and my computer and was able to record some EMG data, so that was good. Thank you so much for reading this, and if you have any questions, make sure to leave them in the comments below.
 |
| The Connection was built! |
Sources
Kessler, Henry H., and Kiessling, Edward
A.. “The Pneumatic Arm Prosthesis.” The American Journal of Nursing, vol. 65, no. 6, 1965, pp. 114–117. 9 Mar. 2017.
http://www.cbs5az.com/story/34711689/valley-boy-comforted-by-doll-with-prosthetic-leg-valley-boy-comforted-by-doll-with-prosthetic-leg
Friday, March 3, 2017
Week 4: Spring Break


I know, nothing much this week, but I can't wait to get back to work next week! I spent my Spring Break just reading some papers, and relaxing and watching movies. The Oscars were entertaining, and beyond that, I watched what I think is the first presidential thing Trump has done. I liked his address to Congress and I felt it was a move in the right direction. I know that for the sophomores, your spring break is this week, so enjoy your break! Feel free to ask any questions in the comments down below! Thank you
Friday, February 24, 2017
Week 3: Software Communication and Prosthetic Reactions

Week 3 was off the a fantastic start. I took President’s day off, and spent the rest of my week reading papers and working to get MATLAB to communicate with the Myo Armband.
I had a lot to get through I had a wrapper program to use MATLAB with the Myo Armband. Basically, after getting the software to get my computer to recognize the Myo Armband, I was able to do the stuff I mentioned last week. I was able to use it as a mouse for my computer, and got rid of stress with Fruit Ninja, but for my project, I was going nowhere. In order to get the data from my simulations, I needed to get the MuJoCo Haptix software to communicate with MATLAB and the Armband.
 This process was kind of extensive, and involved a couple complicated steps. Essentially I had to get it to the point where, using MATLAB, I could program the simulation in the Haptix software with various objects. Then, using the Myo Armband and some sensors, I would be lifting the objects in the simulation, and I could get my program to record the raw EMG data. Then I will be analyzing the EMG data that I obtain. Four days and a couple hours later, I think it works...
This process was kind of extensive, and involved a couple complicated steps. Essentially I had to get it to the point where, using MATLAB, I could program the simulation in the Haptix software with various objects. Then, using the Myo Armband and some sensors, I would be lifting the objects in the simulation, and I could get my program to record the raw EMG data. Then I will be analyzing the EMG data that I obtain. Four days and a couple hours later, I think it works... As another goal of this project, I wanted to analyze the social and psychological implications as a result of prosthetics throughout history. Psychologically, losing a limb takes a huge toll, but the entire process of having and using a prosthetic is a journey in and of itself. In Dr. John C. Racy’s “Psychological Adaptation to Amputation” paper, he identifies that age, personality, lifestyle, and an emotional support are the most important factors in the way a person adjusts to their life with an amputation and a prosthetic. Personally, what I think is the most important is an emotional support system. You need someone who can be flexible and help you out with any problems, and you need someone to support you as you adapt to using the prosthetic. For some this transition can be really hard, because you feel like you have lost something, and you need to grow to accept the situation that you are in. Overall, this paper provided me with a new insightful outlook on people with prosthetics, and what they have gone through. I have linked it below, so feel free to read it if you are interested and get the opportunity.
As another goal of this project, I wanted to analyze the social and psychological implications as a result of prosthetics throughout history. Psychologically, losing a limb takes a huge toll, but the entire process of having and using a prosthetic is a journey in and of itself. In Dr. John C. Racy’s “Psychological Adaptation to Amputation” paper, he identifies that age, personality, lifestyle, and an emotional support are the most important factors in the way a person adjusts to their life with an amputation and a prosthetic. Personally, what I think is the most important is an emotional support system. You need someone who can be flexible and help you out with any problems, and you need someone to support you as you adapt to using the prosthetic. For some this transition can be really hard, because you feel like you have lost something, and you need to grow to accept the situation that you are in. Overall, this paper provided me with a new insightful outlook on people with prosthetics, and what they have gone through. I have linked it below, so feel free to read it if you are interested and get the opportunity.
Something that continuously comes up when reading papers of the history and development of prosthetics is cosmetic appearance. Many prosthetics managed to balance appearance with functionality, but today, most prosthetics are designed to look exactly like the original, even having the same skin tone as the recipient. When designing the Soft Hand Pro device, the device that I am looking at, designers have crafted a "sleeve" type covering that is the color of skin. As a question, I want to know what your reactions would be to different appearances of the same prosthetic device, kind of as a small scale survey to identify any possible stigmas regarding prosthetics’ appearance.
Thank you all for making me the blog of the week! If you have any questions, feel free to ask them below. I will be taking the next week off for my spring break, but I will continue working on the program and reading through papers. Don't Forget to Answer the survey down below!
Google Forms: Prosthetics
Psychological Adaptation to Amputation
See You Later!
Friday, February 17, 2017
Week 2: The Myo Armband


My initial reaction was "What is this? What does this have to do with my project? and Why?"
 Turns out it is really important for my project. It is called a Myo Armband, and it is literally the future. At its core, this device is a gesture control accessory. So for your computer, you can install it and use it as a mouse, you can use it to stop a video, you can use it to play Fruit Ninja(which is really fun), and you can even use it to control a drone. For those of you who have seen Iron Man, you know how he interacts with the holograms using his hands, yeah, this is a step towards that. That could be a reality in the next few years using this technology. I have included gifs of some of what it can do below, but the main point is that it is really cool!
Turns out it is really important for my project. It is called a Myo Armband, and it is literally the future. At its core, this device is a gesture control accessory. So for your computer, you can install it and use it as a mouse, you can use it to stop a video, you can use it to play Fruit Ninja(which is really fun), and you can even use it to control a drone. For those of you who have seen Iron Man, you know how he interacts with the holograms using his hands, yeah, this is a step towards that. That could be a reality in the next few years using this technology. I have included gifs of some of what it can do below, but the main point is that it is really cool!
So, I got this device and I realized that the way this armband works is really important for my project. Like most of you learned in biology, the muscles that control your hand and finger movement are actually in your forearm. So what this armband does is that it uses 8 sensors and records EMG data. What is EMG you ask? I will explain...
Electromyography, abbreviated as EMG, is the recording of muscle movement as a motor response. It measures the electrical response to the motor neuron signal sent to the muscles in your body. EMG is often used to determine muscle health and to identify nerve damage, carpal tunnel, Lou Gehrig's disease and pinched nerves.
 |
| An Electromyogram, plotted as Voltage over Time |
The Arm band uses the EMG's in your forearms that correspond to movements of your fingers. It is able to record the EMG data in an electromyogram, that kind of looks like a polygraph test. What does it have to do with my project? It is literally one of the main pillars for my project. Prosthetics record EMG's as a way to communicate with your mind. So the device that I will be using, the Softhand Pro, has an electrode to communicate with EMG's as to whether the hand should open or close. The use of EMG's with prosthetics actually classifies a division of prosthetics known as Myoprosthetics.
Although this device was created as a consumer electronic, it works as an EMG recording device for my project. This week I worked with this and got it to communicate with MATLAB. This means that when I begin the simulations, I can record the EMG's and take those into account as well.
I hope I explained this clearly. If you have any questions, feel free to comment down below. My week was essentially just playing around with this armband device. Oh, also here are gifs, of what the armband can do.


See you all next week!
Friday, February 10, 2017
Week 1
Week 1 worked to consolidate a solid base for the building that is this project. To begin with, I attended a great Rehabilitation Robotics Workshop, and learned about the research that is going on at ASU’s School of Biological and Health sciences. There were amazing presentations and posters. One that was really interesting was a gait-support walking exoskeleton for stroke patients who were at risk of muscle atrophy in their legs. Essentially, gait-training is physical therapy for people with prosthetic legs, where they learn how to use them, and how to properly support themselves with their new prosthetic. I also began going through the history of prosthetics and looked through some other papers. I wanted to learn more about prosthetics and so I decided to start reading about the history of prosthetics in general.
 For my project, I hoped to analyze the forces involved with the simple action of grasping something, and then compare the data from a real hand to the prosthetic to see how well the prosthetic replicated this action. I realized that I could not only do this with a real prosthetic hand, but that I could also use a simulation software called MuJoCo Haptix. I realized that all of the tests that I wanted to do were centered around the prosthetic device at the lab, and that I could shadow one of the primary projects involving that device and incorporate that data into my project. So at the end of the day, I realized that I could use the simulation and the data from the other project to develop my conclusive outlook towards Prosthetic design. Yeah, a lot of realization, and yet I haven’t obtained nirvana.
For my project, I hoped to analyze the forces involved with the simple action of grasping something, and then compare the data from a real hand to the prosthetic to see how well the prosthetic replicated this action. I realized that I could not only do this with a real prosthetic hand, but that I could also use a simulation software called MuJoCo Haptix. I realized that all of the tests that I wanted to do were centered around the prosthetic device at the lab, and that I could shadow one of the primary projects involving that device and incorporate that data into my project. So at the end of the day, I realized that I could use the simulation and the data from the other project to develop my conclusive outlook towards Prosthetic design. Yeah, a lot of realization, and yet I haven’t obtained nirvana.
For this simulation, I needed to find a way to get the software to record the data. Cue MATLAB!

Thanks to Mr. Peacher and Linear Algebra, I knew a little, but I needed to cement my MATLAB knowledge and learn more. I basically binge-watched MATLAB tutorials, learned about using the Haptix software and read through previous research that utilized the Haptix software. Although this process brought back memories of me studying for the Euro AP, it ultimately helped. I still have a long ways to go, and this studying will probably go into next week, but in the long run, this is going to help when I am analyzing the data that I collect.
Other than that, highlights of my week include Melissa Mccarthy's amazing skit as Sean Spicer on SNL, and the Iron Fist trailer, that was cool.
That’s A Wrap! Thank you!
Subscribe to:
Posts (Atom)